- Behavioral Analysis in advanced technology
According to The Economist, in the 1890s, big cities around the world were grappling with growing volumes of horse manure and urine and the rotting bodies of thousands of dead horses and the spread of disease. By comparison, cars seemed clean and hygienic, a key reason why they were adopted so quickly in the 20th century. “Cars replaced something that was in many ways far worse,” says UCLA’s Donald Shoup in the article “But because of bad planning, they had unintended consequences.”
Today’s champions of CAVs promote a similarly optimistic vision of the future. They believe that CAVs will offer all the advantages of cars without the drawbacks. GM’s boss, Mary Barra, likes to talk of “zero crashes, zero emissions and zero congestion.” Others remind us of how CAVs will offer freedom and independence to people who cannot drive cars: the very old, the very young and the disabled.
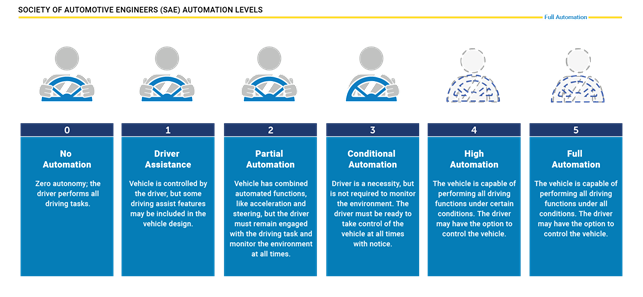
Despite this optimism, CAVs, like cars, could have unintended consequences, too. The partial automation of levels 2 and 3 (See Figure 1) can be unsafe, because drivers are still required to pay attention even when they have handed over control of the vehicle, which they find hard to do. The driver of a level 2 Tesla Model S was killed when his vehicle hit a lorry in May 2016; investigators found that despite warnings from the car, he failed to keep an eye on the road. Videos from the accident involving an Uber vehicle that led to the death of Elaine Herzberg show that the “backup” human driver was not looking at the road in the moments preceding the collision. In a post-crash interview with NTSB investigators, the vehicle operator stated that she had been monitoring the self-driving system interface. Furthermore, Uber had previously disabled the Volvo SUV’s factory-set automatic emergency braking system in order to prevent erratic driving.
As for congestion, if robotaxis are cheap and fast, people will want to use them more, hence road traffic may even increase.
HI-TECH ANALYSIS AND SIMULATIONS
Faced with this profound dilemmas, the humans at the centre of this rapidly changing and uncertain mobility future are increasingly feeling doubtful and fearful.
For CAVs to achieve public acceptance it becomes vital to understand on the one hand their new functionalities and technical limitations, and on the other hand the driver behaviour and attitude patterns toward transport automation. Related to this, the transition phases in going from manual to fully automated driving must also be understood, forecasted and the potential impacts assessed. All of these aspects should improve understanding and therefore lead to a better human control and acceptance through the formation of procedures, rules and monitoring mechanisms for the adoption of CAVs.
Confronted with this challenge, the focus of PAsCAL, which draws inspiration from the French mathematician and inventor that championed the scientific method, is to create the Guide2Autonomy, a comprehensive framework that will allow to better understand the implications of CAVs on society, to educate their future drivers, passengers and those who will have to share the road with them, and to help public and private decision makers navigate the unchartered waters of the transition to a new form of personal mobility.
To do so, LIST and its partners will capture the public’s acceptance and attitude, analyse and assess their concerns, model and simulate realistic scenarios for hand-on practices, and validate the research innovation in a number of trials in the real world. Among the different simulation tools foreseen in the project, LIST will be in charge of measuring individual reactions with eye-tracking, biosensors, as well as behavioural analyses. LIST researchers will make use of their readily transportable low-immersive car simulator to perform the trials, and will also make it available to their partners. In parallel, they will test reactions of people around CAV such as pedestrians using a circular immersive arena with a perimeter of 12 meters and a diameter of 4 meters where one or more users can be physically immersed in a full real scale urban environment simulator.
